






Altímetro de radar

Content
Princípio
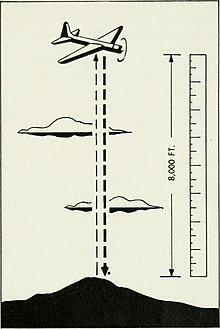
Como o nome indica, o radar (detecção de rádio e variação) é o princípio subjacente do sistema. O sistema transmite ondas de rádio para o chão e mede o tempo que leva para se refletir de volta à aeronave. A altitude acima do solo é calculada a partir do tempo de viagem das ondas de rádio e da velocidade da luz. Os altímetros de radar exigiram um sistema simples para medir o tempo de voo que poderia ser exibido usando instrumentos convencionais, em oposição a um tubo de raios catódicos normalmente usado nos sistemas de radar precoce.
Para fazer isso, o transmissor envia um sinal modulado de frequência que as mudanças na frequência ao longo do tempo, aumentando e para baixo entre dois limites de frequência, FMIN e FMAX ao longo de um determinado tempo, T. Nas primeiras unidades, isso foi realizado usando um tanque LC com Um capacitor de ajuste acionado por um pequeno motor elétrico. A saída é então misturada com o sinal da transportadora de radiofrequência e enviou a antena de transmissão.
Como o sinal leva algum tempo para chegar ao solo e retornar, a frequência do sinal recebida é um pouco atrasada em relação ao sinal que está sendo enviado nesse instante. A diferença nessas duas frequências pode ser extraída em um misturador de frequência e, como a diferença nos dois sinais se deve ao atraso que atinge o solo e as costas, a frequência de saída resultante codifica a altitude. A saída é normalmente da ordem de centenas de ciclos por segundo, não de megacicles, e pode ser facilmente exibida em instrumentos analógicos. Essa técnica é conhecida como radar de onda contínua modulada pela frequência.
Os altímetros de radar normalmente funcionam na banda E, a banda ka, ou, para medição mais avançada no nível do mar, banda s. Os altímetros de radar também fornecem um método confiável e preciso de medir a altura acima da água, ao voar longas faixas do mar. Eles são críticos para o uso ao operar de e para as plataformas de petróleo.
A altitude especificada pelo dispositivo não é a altitude indicada do altímetro barométrico padrão. Um altímetro de radar mede a altitude absoluta - a altura acima do nível do solo (AGL). A altitude absoluta às vezes é chamada de altura [citação necessária] porque é a altura acima do terreno subjacente.
A partir de 2010, todos os altímetros de radar comercial usam modulação de frequência linear-onda contínua (LFM-CW ou FM-CW) .A de 2010, cerca de 25.000 aeronaves nos EUA têm pelo menos um altímetro de rádio.
História
Conceito original
O conceito subjacente do altímetro do radar foi desenvolvido independentemente do campo de radar mais amplo e se origina em um estudo de telefonia de longa distância no Bell Labs. Durante a década de 1910, o telefone da sino estava lutando com o reflexo de sinais causados por alterações na impedância nas linhas telefônicas, normalmente onde o equipamento conectado aos fios. Isso foi especialmente significativo nas estações repetidoras, onde as impedâncias mal correspondentes refletiriam grandes quantidades do sinal e dificultam a telefonia de longa distância.
Os engenheiros notaram que as reflexões pareciam ter um padrão "Humpy" para eles; Para qualquer frequência de sinal, o problema só seria significativo se os dispositivos estivessem localizados em pontos específicos da linha. Isso levou à idéia de enviar um sinal de teste para a linha e alterar sua frequência até que os ecos significativos fossem vistos e, em seguida, determinar a distância desse dispositivo para que pudesse ser identificada e fixada.
Lloyd Espenschied estava trabalhando no Bell Labs quando concebeu o uso desse mesmo fenômeno para medir distâncias em um fio. Um de seus primeiros desenvolvimentos neste campo foi uma patente de 1919 (concedida em 1924) sobre a idéia de enviar um sinal para trilhos e medir a distância para descontinuidades. Eles podem ser usados para detectar faixas quebradas ou, se a distância estava mudando mais rapidamente do que a velocidade do trem, outros trens na mesma linha.
Medições de ionosfera de Appleton
Durante esse mesmo período, houve um grande debate em física sobre a natureza da propagação do rádio. As transmissões trans-atlânticas de Guglielmo Marconi pareciam impossíveis. Estudos de sinais de rádio demonstraram que viajaram em linhas retas, pelo menos a longas distâncias, de modo que a transmissão da Cornualha deveria ter desaparecido no espaço em vez de ser recebido na Terra Nova. Em 1902, Oliver Heaviside no Reino Unido e Arthur Kennelly nos EUA postularam independentemente a existência de uma camada ionizada na atmosfera superior que estava saltando o sinal de volta ao chão para que pudesse ser recebido. Isso ficou conhecido como a camada Heaviside.
Enquanto uma idéia atraente, faltava evidências diretas. Em 1924, Edward Appleton e Miles Barnett conseguiram demonstrar a existência de uma camada em uma série de experimentos realizados em parceria com a BBC. Depois que as transmissões programadas terminaram para o dia, um transmissor da BBC em Bournemouth enviou um sinal que aumentou lentamente em frequência. Isso foi escolhido pelo receptor de Appleton em Oxford, onde dois sinais apareceram. Um era o sinal direto da estação, a onda de solo, enquanto o outro foi recebido mais tarde, depois de viajar para a camada Heaviside e de volta, a onda do céu.
O truque foi como medir com precisão a distância percorrida pela onda Sky para demonstrar que estava realmente no céu. Esse era o objetivo da mudança de frequência. Como o sinal de solo percorreu uma distância mais curta, era mais recente e, portanto, mais perto da frequência que está sendo enviada nesse instante. A onda do céu, tendo que percorrer uma distância mais longa, foi adiada e, portanto, era a frequência como era há algum tempo. Ao misturar os dois em um misturador de frequência, é produzido um terceiro sinal que possui sua própria frequência única que codifica a diferença nas duas entradas. Como neste caso a diferença se deve ao caminho mais longo, a frequência resultante revela diretamente o comprimento do caminho. Embora tecnicamente mais desafiador, essa foi a mesma técnica básica usada por Bell para medir a distância dos refletores no fio.
Everitt e Newhouse
Em 1929, William Littell Everitt, professor da Universidade Estadual de Ohio, começou a considerar o uso da técnica básica de Appleton como base para um sistema de altímetro. Ele designou o trabalho a dois idosos, Russell Conwell Newhouse e M. W. Havel. Seu sistema experimental era mais em comum com o trabalho anterior em Bell, usando alterações na frequência para medir a distância até o final dos fios. Os dois o usaram como base para uma tese sênior conjunta em 1929.
A Everitt divulgou o conceito ao escritório de patentes dos EUA, mas não registrou uma patente naquele momento. Ele então se aproximou do Daniel Guggenheim Fund para a promoção da aeronáutica para financiamento para o desenvolvimento. Jimmy Doolittle, secretário da fundação, abordou Vannevar Bush, da Bell Labs, para julgar. Bush estava cético de que o sistema pudesse ser desenvolvido naquele momento, mas, no entanto, sugeriu o desenvolvimento do fundo da fundação de um modelo de trabalho. Isso permitiu a Newhouse construir uma máquina experimental que formou a base de sua tese de mestrado em 1930, em parceria com J. D. Corley.
O dispositivo foi levado para o Wright Field, onde foi testado por Albert Francis Helgenberger, um especialista especialista em navegação de aeronaves. HEGENBERGER descobriu que o sistema funcionava como anunciado, mas afirmou que teria que trabalhar em frequências mais altas para ser prático.
Espenschied e Newhouse
Espenschied também estava considerando o uso da idéia de Appleton para medição de altitude. Em 1926, ele sugeriu a idéia, tanto como uma maneira de medir a altitude quanto um sistema prospectivo para evitar o terreno e a detecção de colisão. No entanto, naquela época, a frequência dos sistemas de rádio disponível, mesmo no que era conhecido como ondas curtas, era calculado como cinquenta vezes menor do que o necessário para um sistema prático.
Espenschied acabou apresentando uma patente sobre a idéia em 1930. A essa altura, Newhouse havia deixado o estado de Ohio e assumiu uma posição no Bell Labs. Aqui ele conheceu Peter Sandretto, que também estava interessado em tópicos de navegação por rádio. Sandretto deixou Bell em 1932 para se tornar o superintendente de comunicações na United Air Lines (UAL), onde liderou o desenvolvimento de sistemas de rádio comerciais.
A patente da Espenschied não foi concedida até 1936, e sua publicação gerou intensa interesse. Na mesma época, a Bell Labs trabalhava em novos designs de tubos capazes de entregar entre 5 e 10 watts a 500 MHz, perfeitos para o papel. Isso levou Sandretto a entrar em contato com Bell sobre a idéia e, em 1937, uma parceria entre Bell Labs e UAL foi formada para construir uma versão prática. Liderado por Newhouse, uma equipe tinha um modelo de trabalho em testes no início de 1938, e a Western Electric (Bell's Manufacturing Division) já estava se preparando para um modelo de produção. A Newhouse também apresentou várias patentes sobre melhorias na técnica com base neste trabalho.
Introdução comercial
O sistema foi anunciado publicamente em 8 e 9 de outubro de 1938. Durante a Segunda Guerra Mundial, a produção em massa foi adotada pela RCA, que os produziu sob os nomes ABY-1 e RC-24. Na era do pós-guerra, muitas empresas adotaram a produção e tornou-se um instrumento padrão em muitas aeronaves à medida que o pouso cego se tornou comum.
Um artigo que descreve o sistema foi publicado em conjunto por Espenschied e Newhouse no ano seguinte. O artigo explora fontes de erro e conclui que o pior cenário interno foi da ordem de 9%, mas isso pode chegar a 10% ao voar sobre terrenos acidentados, como as áreas construídas das cidades.
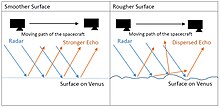
Durante os primeiros vôos do sistema, percebeu -se que o padrão dos retornos, como visto em um osciloscópio, era distinto para diferentes tipos de terreno abaixo da aeronave. Isso abriu a possibilidade de todos os tipos de outros usos para a mesma tecnologia, incluindo varredura e navegação no solo. No entanto, esses conceitos não foram capazes de ser explorados por Bell na época.
Use como radar de uso geral
Sabe -se desde o final do século XIX que o metal e a água fizeram excelentes refletores de sinais de rádio, e houve várias tentativas de construir detectores de navios, treinar e iceberg ao longo dos anos desde então. A maioria deles tinha limitações práticas significativas, especialmente o uso de sinais de baixa frequência que exigiam grandes antenas para fornecer desempenho razoável. A unidade Bell, operando com uma frequência base de 450 MHz, estava entre os sistemas de frequência mais alta de sua época.
No Canadá, o Conselho Nacional de Pesquisa começou a trabalhar em um sistema de radar aéreo usando o altímetro como base. Isso foi uma grande surpresa para os pesquisadores britânicos quando eles visitaram em outubro de 1940 como parte da missão Tizard, como os britânicos acreditavam na época que eram os únicos que trabalhavam no conceito. No entanto, o design canadense foi abandonado em favor da construção do design britânico ASV Mark II, totalmente desenvolvido, que operava em níveis de potência muito mais altos.
Na França, os pesquisadores da Divisão Francesa da IT & T estavam realizando experimentos semelhantes quando a invasão alemã se aproximou dos laboratórios em Paris. Os laboratórios foram deliberadamente destruídos para impedir que a pesquisa caia nas mãos alemãs, mas as equipes alemãs encontraram as antenas nos escombros e exigiram uma explicação. O diretor de pesquisa de TI&T desviou a suspeita, mostrando-lhes a unidade na capa de uma revista e admoestando-os por não serem atualizados sobre as mais recentes técnicas de navegação.
Formulários

Na aviação civil
Os altímetros de radar são frequentemente usados por aeronaves comerciais para abordagem e pouso, especialmente em condições de baixa visibilidade (consulte Regras de voo do instrumento) e desembarques automáticos, permitindo que o piloto automático saiba quando iniciar a manobra de flare. Os altímetros de radar fornecem dados ao AutoTrottle, que faz parte do computador de vôo.
Os altímetros de radar geralmente dão apenas leituras de até 760 m (AGL) acima de 2.500 pés (760 m). Freqüentemente, o radar meteorológico pode ser direcionado para baixo para dar uma leitura de um alcance mais longo, até 18.000 m acima do nível do solo (AGL). A partir de 2012 [Atualização], todos os aviões estão equipados com pelo menos dois e possivelmente mais altímetros de radar, pois são essenciais para os recursos da Autoland. (A partir de 2012 [Atualizar], determinar a altura através de outros métodos como o GPS não é permitido por regulamentos.) Aviários mais velhos da década de 1960 (como a British Aircraft Corporation BAC 1-11) e os aviões menores na classe de assentos abaixo de 50 (como a série ATR 42 e BAE JetStream) estão equipados com eles.
Os altímetros de radar são uma parte essencial nos sistemas de aviso de proximidade do solo (GPWs), alertando o piloto se a aeronave estiver voando muito baixa ou descendo rapidamente. No entanto, os altímetros de radar não podem ver o terreno diretamente à frente da aeronave, apenas isso abaixo dele; Essa funcionalidade requer conhecimento da posição e do terreno nessa posição ou de um radar de terreno com aparência para a frente. As antenas do altímetro do radar têm um lobo principal bastante grande de cerca de 80 °, de modo que, em ângulos bancários de até 40 °, o radar detecta a faixa da aeronave até o solo (especificamente para o objeto refletivo grande mais próximo). Isso ocorre porque o intervalo é calculado com base no retorno do primeiro sinal de cada período de amostragem. Ele não detecta alcance inclinado até mais de 40 ° de banco ou tom. Isso não é um problema para pousar, pois o passo e o rolo normalmente não excedem 20 °.
Os altímetros de rádio usados na aviação civil operam na banda C IEEE entre 4,2 e 4,4 GHz.
No início de 2022, a potencial interferência das torres de telefone celular 5G causou alguns atrasos de voo e alguns cancelamentos de voo nos Estados Unidos.
Na aviação militar

Os altímetros de radar também são usados em aeronaves militares para voar bastante baixo sobre a terra e o mar para evitar a detecção e direcionamento de radares por armas antiaéreas ou mísseis superficial para o ar. Um uso relacionado da tecnologia de altímetro de radar é o radar seguinte ao terreno, que permite que os bombardeiros de caça voem em altitudes muito baixas.
Os F-111s da Força Aérea Real da Austrália e da Força Aérea dos EUA têm um sistema de radar (TFR) de seguidores de terreno (TFR), conectado via computador digital aos seus pilotos automáticos. Sob o radoma do nariz estão duas antenas TFR separadas, cada uma fornecendo informações individuais ao sistema TFR de canal duplo. Em caso de falha nesse sistema, o F-111 possui um sistema de altímetro de radar de backup, também conectado ao piloto automático. Então, se o F-111 mergulhar abaixo da altitude mínima predefinida (por exemplo, 15 metros) por qualquer motivo, seu piloto automático será ordenado a colocar o F-111 em uma mosca 2G (uma subida íngreme de nariz) para evitar colidir com terrenos ou água. Mesmo em combate, o risco de uma colisão é muito maior do que o perigo de ser detectado por um inimigo. Sistemas semelhantes são usados por aeronaves Super Hornet F/A-18 operadas pela Austrália e pelos Estados Unidos.
Regulamentação internacional
A União Internacional de Telecomunicações (ITU) define altímetros de rádio como “equipamentos de radionavigação, a bordo de uma aeronave ou espaçonave, usados para determinar a altura da aeronave ou a espaçonave acima da superfície da Terra ou de outra superfície" no artigo 1.108 dos regulamentos de rádio da UTU ( RR). O equipamento de radionavigação deve ser classificado pelo Serviço de Radiocomunicações no qual opera permanente ou temporariamente. O uso de equipamentos de altímetro de rádio é categorizado como um serviço de segurança da vida, deve ser protegido para interferências e é uma parte essencial da navegação .