






Telerobótica

Content
Teleoperation
A teleooperação indica a operação de uma máquina à distância. É semelhante em significado à frase "controle remoto", mas geralmente é encontrado em pesquisas, ambientes acadêmicos e técnicos. É mais comumente associado a robótica e robôs móveis, mas pode ser aplicado a toda uma gama de circunstâncias nas quais um dispositivo ou máquina é operado por uma pessoa à distância.

A teleooperação é o termo mais padrão, usado em comunidades técnicas e de pesquisa, para se referir à operação à distância. Isso se opõe a "telepresença", que se refere ao subconjunto de sistemas telerobóticos configurados com uma interface imersiva, de modo que o operador se sinta presente no ambiente remoto, projetando sua presença através do robô remoto. Um dos primeiros sistemas de telepresença que permitiu que os operadores se sentissem presentes em um ambiente remoto através de todos os sentidos primários (visão, som e toque) foi o sistema de acessórios virtuais desenvolvido nos laboratórios de pesquisa da Força Aérea dos EUA no início dos anos 90. O sistema permitiu que os operadores executassem tarefas hábeis (inserindo pinos em buracos) remotamente, de modo que o operador sentiria como se estivesse inserindo os pinos quando, na verdade, era um robô executando remotamente a tarefa.
Um telemanipulador (ou teleoperador) é um dispositivo controlado remotamente por um operador humano. Em casos simples, as ações de comando do operador de controle correspondem diretamente às ações no dispositivo controlado, como por exemplo, em uma aeronave modelo controlada por rádio ou em um veículo de submersão profunda amarrada. Onde os atrasos nas comunicações tornam impraticável o controle direto (como um rover planetário remoto), ou é desejado reduzir a carga de trabalho do operador (como em uma aeronave de espionagem ou ataque controlada remotamente), o dispositivo não será controlado diretamente, em vez disso, sendo ordenado a seguir a A seguir caminho especificado. Em níveis crescentes de sofisticação, o dispositivo pode operar um pouco de forma independente em questões como evitar obstáculos, também comumente empregada em rovers planetários.
Os dispositivos projetados para permitir que o operador controlasse um robô à distância às vezes são chamados de robótica telecérica.
Dois componentes principais de telerobótica e telepresença são os aplicativos visuais e de controle. Uma câmera remota fornece uma representação visual da visualização do robô. Colocar a câmera robótica em uma perspectiva que permite o controle intuitivo é uma técnica recente que, embora baseada na ficção científica (Waldo 1942, de Robert A. Heinlein, não tenha sido proveitosa, pois a velocidade, a resolução e a largura de banda só recentemente foram adequadas à tarefa de ser capaz de controlar a câmera de robô de uma maneira significativa. Usando uma tela montada na cabeça, o controle da câmera pode ser facilitado rastreando a cabeça, como mostrado na figura abaixo.
Isso só funciona se o usuário se sentir confortável com a latência do sistema, o atraso na resposta aos movimentos, na representação visual. Quaisquer questões como resolução inadequada, latência da imagem em vídeo, atraso no processamento mecânico e de computador do movimento e resposta e distorção óptica devido à lente da câmera e lentes de exibição montadas na cabeça, podem causar a "doença do simulador" do usuário que é exacerbado pela falta de estimulação vestibular com a representação visual do movimento.
Incompatibilidade entre os usuários movimentos, como erros de registro, atraso na resposta do movimento devido à excesso de filtragem, resolução inadequada para movimentos pequenos e velocidade lenta pode contribuir para esses problemas.
A mesma tecnologia pode controlar o robô, mas os problemas de coordenação ocular se tornam ainda mais difundidos através do sistema, e a tensão ou frustração do usuário podem dificultar o uso do sistema. [Citação necessária]
A tendência a construir robôs tem sido minimizar os graus de liberdade, porque isso reduz os problemas de controle. Melhorias recentes nos computadores mudaram a ênfase para mais graus de liberdade, permitindo dispositivos robóticos que parecem mais inteligentes e mais humanos em seus movimentos. Isso também permite uma teleoperação mais direta, pois o usuário pode controlar o robô com seus próprios movimentos.
Interfaces
Uma interface telerobótica pode ser tão simples quanto uma interface MMK comum (monitor-mouse-teclado). Embora isso não seja imersivo, é barato. A telerobótica impulsionada pelas conexões da Internet geralmente é desse tipo. Uma modificação valiosa para o MMK é um joystick, que fornece um esquema de navegação mais intuitivo para o movimento do robô planar.
As configurações dedicadas de telepresença utilizam uma tela montada na cabeça com tela de olho simples ou dupla e uma interface ergonomicamente correspondente com o joystick e o botão relacionado, slider e controles de gatilho.
Outras interfaces mesclam interfaces de realidade virtual totalmente imersivas e vídeo em tempo real, em vez de imagens geradas por computador. Outro exemplo seria usar uma esteira omnidirecional com um sistema de exibição imersivo para que o robô seja impulsionado pela pessoa andando ou correndo. Modificações adicionais podem incluir exibições de dados mesclados, como imagens térmicas infravermelhas, avaliação de ameaças em tempo real ou esquemas de dispositivos. [Citação necessária]
Formulários
Espaço
Com exceção do programa Apollo, a maior parte da exploração espacial foi realizada com sondas espaciais telerobóticas. A maioria das astronomia espacial, por exemplo, foi realizada com telescópios telerobóticos. A missão russa Lunokhod-1, por exemplo, colocou um veículo espacial remotamente acionado na lua, que foi conduzido em tempo real (com um atraso de tempo de velocidade de luz de 2,5 segundos) pelos operadores humanos no chão. Os programas de exploração planetária robótica usam naves espaciais que são programadas por seres humanos em estações terrestres, essencialmente alcançando uma forma de atraso de operação telerobótica de longa data. Exemplos notáveis recentes incluem o Marte Exploration Rovers (MER) e o Rover de Curiosidade. No caso da missão Mer, a espaçonave e o veículo espacial operaram em programas armazenados, com os direcionadores do Rover na programação do solo todos os dias. A Estação Espacial Internacional (ISS) usa um telemanipulador de dois braços chamado Dextre. Mais recentemente, um robô humanóide Robonaut foi adicionado à estação espacial para experimentos telerobóticos.
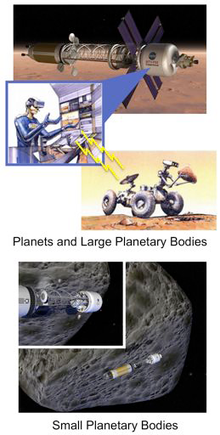
A NASA propôs o uso de sistemas telerobóticos altamente capazes para futura exploração planetária usando a exploração humana da órbita. Em um conceito para a exploração de Marte proposta por Landis, uma missão precursora de Marte poderia ser feita em que o veículo humano traz uma tripulação para Marte, mas permanece em órbita, em vez de pousar na superfície, enquanto um robô remoto altamente capaz é operado em real tempo na superfície. Esse sistema iria além da robótica simples de atraso de longa data e passaria para um regime de telepresença virtual no planeta. Um estudo desse conceito, a exploração humana usando o conceito de operações robóticas em tempo real (Herro), sugeriu que essa missão poderia ser usada para explorar uma ampla variedade de destinos planetários.
Telepresença e videoconferência

A prevalência de videoconferência de alta qualidade usando dispositivos móveis, tablets e computadores portáteis permitiu um crescimento drástico em robôs de telepresença para ajudar a dar uma melhor sensação de presença física remota para comunicação e colaboração no escritório, casa, escola etc. quando não se pode estar lá pessoalmente. O robô Avatar pode se mover ou olhar em volta para o comando da pessoa remota.
Houve duas abordagens principais que utilizam videoconferência em uma tela.
Desktop telepresence robots typically mount a phone or tablet on a motorized desktop stand to enable the remote person to look around a remote environment by panning and tilting the display.Drivable telepresence robots typically contain a display (integrated or separate phone or tablet) mounted on a roaming base. More modern roaming telepresence robots may include an ability to operate autonomously. The robots can map out the space and be able to avoid obstacles while driving themselves between rooms and their docking stations.Os sistemas tradicionais de videoconferência e as salas de telepresença geralmente oferecem câmeras de zoom de inclinação com controle final. A capacidade do usuário remoto de virar a cabeça do dispositivo e olhar em volta naturalmente durante uma reunião é frequentemente visto como a característica mais forte de um robô de telepresença. Por esse motivo, os desenvolvedores surgiram na nova categoria de robôs de telepresence de desktop que se concentram nesse recurso mais forte para criar um robô de custo muito mais baixo. Os robôs de Telepresence da Desktop, também chamados de "robôs de cabeça e pescoço" permitem que os usuários olhem em volta durante uma reunião e são pequenos o suficiente para serem transportados de local para local, eliminando a necessidade de navegação remota.
Alguns robôs de telepresença são altamente úteis para algumas crianças com doenças de longo prazo, que não conseguiram frequentar a escola regularmente. As mais recentes tecnologias inovadoras podem reunir as pessoas, e isso permite que elas permaneçam conectadas entre si, o que as ajuda significativamente a superar a solidão.
Aplicações marítimas
Os veículos marítimos operados remotamente (ROVs) são amplamente utilizados para trabalhar na água muito profundos ou perigosos demais para mergulhadores. Eles reparam plataformas de petróleo offshore e anexam cabos aos navios afundados para içar. Eles geralmente são presos por uma corda a um centro de controle em um navio de superfície. Os destroços do Titanic foram explorados por um ROV, bem como por um navio operado pela tripulação.
Telemedicina
Além disso, muita pesquisa telerobótica está sendo realizada no campo de dispositivos médicos e sistemas cirúrgicos minimamente invasivos. Com um sistema de cirurgia robótica, um cirurgião pode trabalhar dentro do corpo através de pequenos orifícios grandes o suficiente para o manipulador, sem a necessidade de abrir a cavidade torácica para permitir as mãos dentro.
Resposta de emergência e robôs policiais
O NIST mantém um conjunto de padrões de teste usados para resposta a emergências e sistemas telerobóticos de aplicação da lei.
Outras aplicações
Os manipuladores remotos são usados para lidar com materiais radioativos.
A telerobótica tem sido usada nas obras de arte da instalação; Telegarden é um exemplo de projeto em que um robô foi operado pelos usuários através da Web.